物理シミュレーションはROSなしでは苦しいと思ってましたが……あるとこにはあるんですねぇ。
実際のところ
今回目的としているxArmのURDFモデルはライブラリにデフォでついてきます。
GitHub - bulletphysics/bullet3: Bullet Physics SDK: real-time collision detection and multi-physics simulation for VR, games, visual effects, robotics, machine learning etc.
Google Colaboratryで
%%time !pip install pybullet
import pybullet as p import pybullet_data as pd import numpy as np import matplotlib.pyplot as plt from matplotlib import pylab %matplotlib inline p.connect(p.DIRECT) #allow to find the assets (URDF, obj, textures etc) p.setAdditionalSearchPath(pd.getDataPath())
p.resetSimulation() p.configureDebugVisualizer(p.COV_ENABLE_GUI) useFixedBase = True flags = p.URDF_INITIALIZE_SAT_FEATURES plane_pos = [0,0,-0.625] plane = p.loadURDF("plane.urdf", plane_pos, flags = flags, useFixedBase=useFixedBase) table_pos = [0,0,-0.625] table = p.loadURDF("table/table.urdf", table_pos, flags = flags, useFixedBase=useFixedBase) xarm = p.loadURDF("xarm/xarm6_robot.urdf", flags = flags, useFixedBase=useFixedBase)
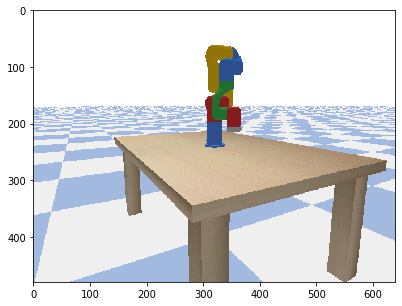
%%time camTargetPos = [0, 0, 0] cameraUp = [0, 0, 1] cameraPos = [1, 1, 1] p.setGravity(0, 0, -9.8) from google.colab import widgets import numpy as np import random import time from matplotlib import pylab grid = widgets.Grid(2, 2) yaw = 0 r = 0 c = 0 yaw = 60 with grid.output_to(r, c): grid.clear_cell() pylab.figure(figsize=(10, 5)) pitch = -10.0 roll = 0 upAxisIndex = 2 camDistance = 1.5 pixelWidth = 640 pixelHeight = 480 nearPlane = 0.01 farPlane = 100 fov = 60 viewMatrix = p.computeViewMatrixFromYawPitchRoll(camTargetPos, camDistance, yaw, pitch, roll, upAxisIndex) aspect = pixelWidth / pixelHeight projectionMatrix = p.computeProjectionMatrixFOV(fov, aspect, nearPlane, farPlane) img_arr = p.getCameraImage(pixelWidth,pixelHeight,viewMatrix,projectionMatrix) w = img_arr[0] #width of the image, in pixels h = img_arr[1] #height of the image, in pixels rgb = img_arr[2] #color data RGB dep = img_arr[3] #depth data print("w=",w,"h=",h) np_img_arr = np.reshape(rgb, (h, w, 4)) np_img_arr = np_img_arr * (1. / 255.) pylab.imshow(np_img_arr, interpolation='none', animated=True, label="pybullet")
レンダリングすると、こんな塩梅で画像が表示されます。
公式のデモではデプスカメラの解析だの犬ロボットの