FUROBOTコンポーネントをつかい動作計画をやってみます
実際のところ


{650, -200, 0}
{680.677146, -165.984044, 0}
{707.466818, -128.835481, 0}
{729.288982, -88.582217, 0}
{744.336809, -45.365167, 0}
{750, 0, 0}
{744.336809, 45.365168, 0}
{729.288982, 88.582217, 0}
{707.466818, 128.835482, 0}
{680.677145, 165.984045, 0}
{650, 200, 0}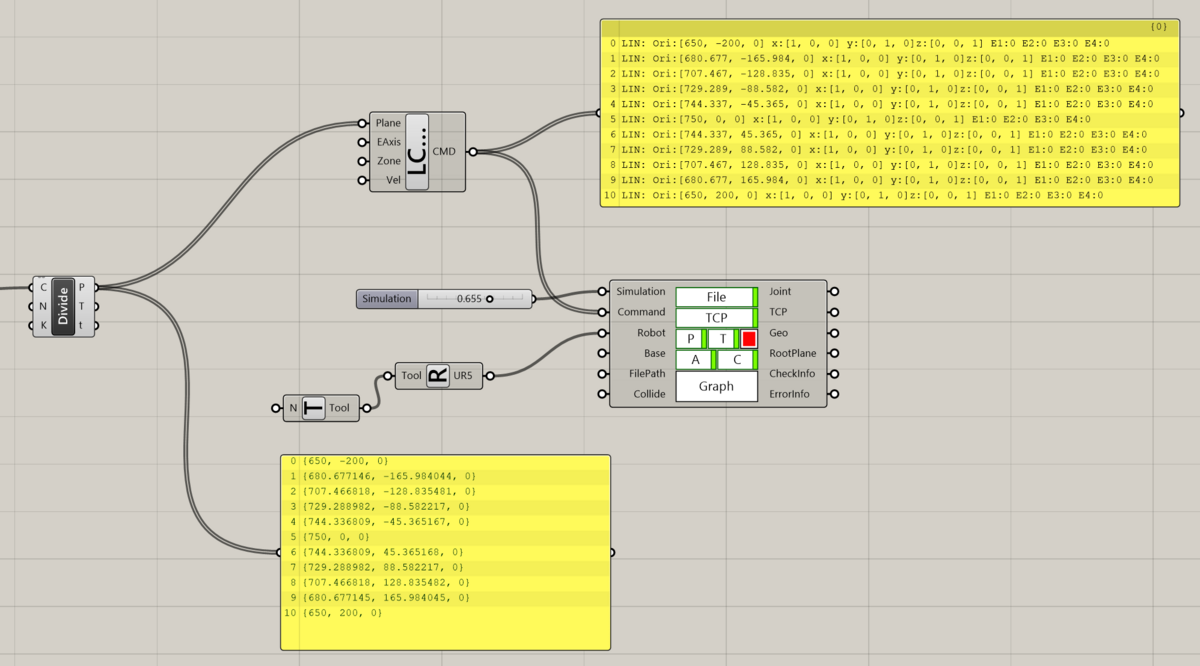
LIN: Ori:[650, -200, 0] x:[1, 0, 0] y:[0, 1, 0]z:[0, 0, 1] E1:0 E2:0 E3:0 E4:0 LIN: Ori:[680.677, -165.984, 0] x:[1, 0, 0] y:[0, 1, 0]z:[0, 0, 1] E1:0 E2:0 E3:0 E4:0 LIN: Ori:[707.467, -128.835, 0] x:[1, 0, 0] y:[0, 1, 0]z:[0, 0, 1] E1:0 E2:0 E3:0 E4:0 LIN: Ori:[729.289, -88.582, 0] x:[1, 0, 0] y:[0, 1, 0]z:[0, 0, 1] E1:0 E2:0 E3:0 E4:0 LIN: Ori:[744.337, -45.365, 0] x:[1, 0, 0] y:[0, 1, 0]z:[0, 0, 1] E1:0 E2:0 E3:0 E4:0 LIN: Ori:[750, 0, 0] x:[1, 0, 0] y:[0, 1, 0]z:[0, 0, 1] E1:0 E2:0 E3:0 E4:0 LIN: Ori:[744.337, 45.365, 0] x:[1, 0, 0] y:[0, 1, 0]z:[0, 0, 1] E1:0 E2:0 E3:0 E4:0 LIN: Ori:[729.289, 88.582, 0] x:[1, 0, 0] y:[0, 1, 0]z:[0, 0, 1] E1:0 E2:0 E3:0 E4:0 LIN: Ori:[707.467, 128.835, 0] x:[1, 0, 0] y:[0, 1, 0]z:[0, 0, 1] E1:0 E2:0 E3:0 E4:0 LIN: Ori:[680.677, 165.984, 0] x:[1, 0, 0] y:[0, 1, 0]z:[0, 0, 1] E1:0 E2:0 E3:0 E4:0 LIN: Ori:[650, 200, 0] x:[1, 0, 0] y:[0, 1, 0]z:[0, 0, 1] E1:0 E2:0 E3:0 E4:0
FUROBOTは初回はログインが必要

自動でデフォブラウザに飛ばされるので、必要な情報を登録して使う
