ROSであればrvizなどでモデルを確認できたりますが
genesisのCLIツールgsにもURDFを確認することができます
実際のところ
四脚ロボット
$ git clone https://github.com/Derek-TH-Wang/mini_cheetah_urdf
$ cd ~/mini_cheetah_urdf/urdf $ gs view laikago.urdf
ちゃんと実行できると、
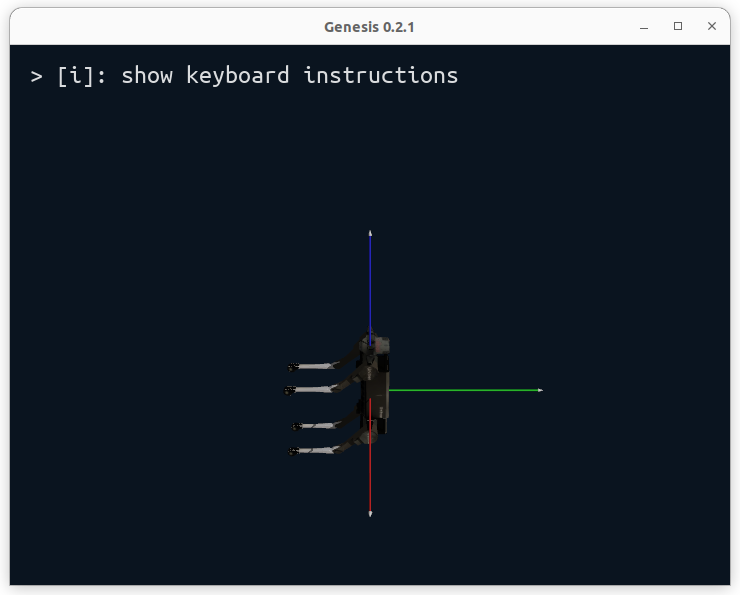
ちゃんと軸設定されているからか、なんと軸操作UIつき

視点を変更してUIイジると、こんな感じで動作を確認できます
