rqt_graphはROSノードの可視化ツールの一つで、
ROSノードがどのように連携しているか確認したり、
そもそも関係性が適切か確認したりできます。
実際のところ
起動確認
ros-humble-desktopをぶち込んでいれば、素で入っているので
$ rqt_graph
とやると、空のファイルがでてきます。
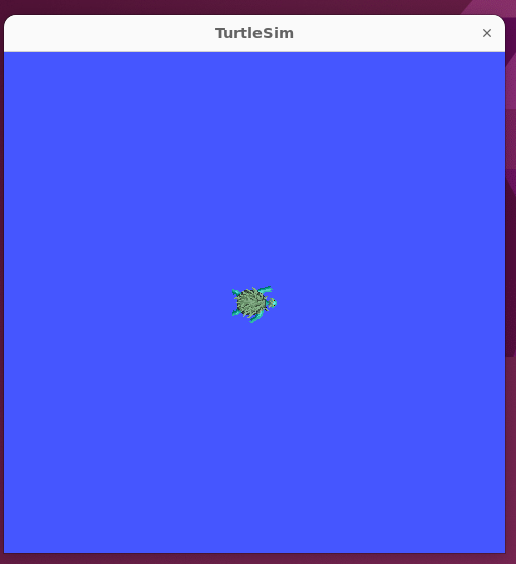
turtlesimの起動
先ほどと同様、ros-humble-desktopの中に
$ ros2 run turtlesim turtlesim_node
rqt_graphの確認
この状態でrqt_graphにフォーカスを移動し、左上の更新マークをおすと

さらにここでキー入力を受け付ける奴を実行し
ros2 run turtlesim turtle_teleop_key
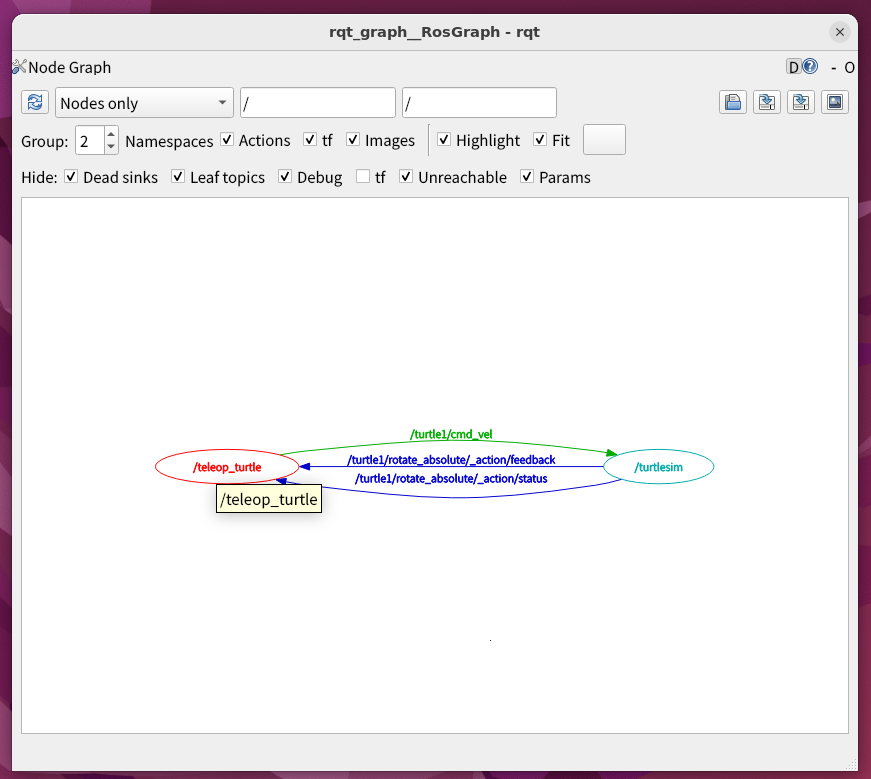
更新マークを押すと……新しい関係性がでてきます。

矢印をマウスオーバーすると、ノードとの関係性が色付きで出てきます。