実際のところ
$ pip list | grep setup colcon-python-setup-py 0.2.8 setuptools 59.6.0
$ pip install setuptools==58.2.0
$ pip list | grep setup colcon-python-setup-py 0.2.8 setuptools 58.2.0
今回使うのはrealsenseなので、カメラは"/color"を指定
sizeは縦横の「交点」、squareはメートル単位の「升目の幅」を設定します。
チェッカーボードそのものはROS公式にあったものをA4用紙に縮小して印刷し値を実測で反映しておきます
ros2 run camera_calibration cameracalibrator --size 8x6 --square 0.025 image:=/color/image_raw camera:=/color
コマンドの実行
で、実行した結果がコチラ。
キャリブレーションの結果がカラーで出てくるので、モノクロで表示されてきます
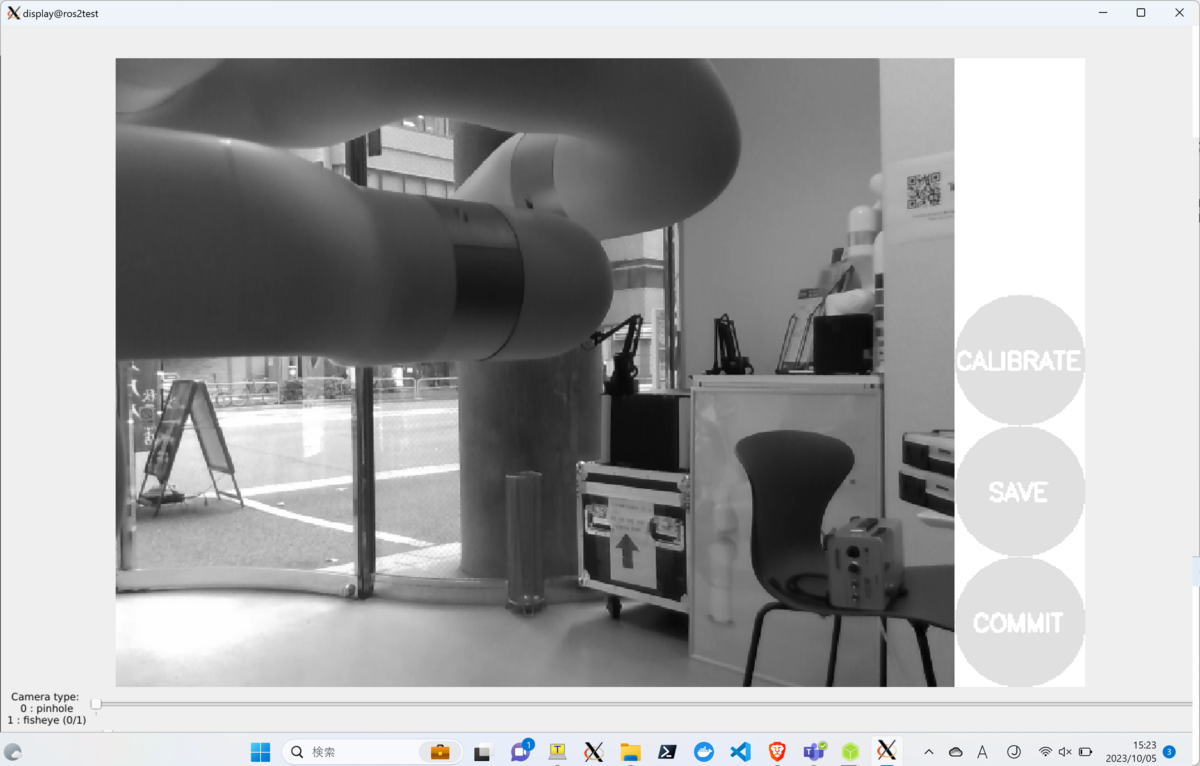
カッターマットにチェッカーボードを貼り付けて実行した結果がこちら

あとは、この板をもって1分ほど画角内を上下左右前後に移動していると補正ボタンがでる

補正が完了すると、「SAVE」がでる
デフォでは/tmp以下のcalibrationdata.tar.gzに保存される一時情報なので、問題を起こす前に移行しておくこと
